For many years I have attempted to provide my clientele with the best service possible. More learned scholars and I have differed in my general approach over the years. One simple premise which is undeniable: "follow in the footsteps of the original surveyor". Many times this premise is extremely difficult and time consuming. At best, the opinion may not have a high degree of certainty. We as surveyors do not have to achieve "beyond a shadow of doubt" and can rely on a "preponderance of evidence".
Furthermore, our task is not to merely define the present evidence, but to ascertain "a snapshot in time" for those conditions predominate as of the date of the conveyance description. The conveyance date is not attributable to the last deed of record, but that date of the original scrivener. A difficult task. Often the description presented has been utilized or 50 years, from owner to owner and thus perpetuating the title. We then must rely on what I term "my way-back machine". Does our commission constitute the first actual survey? What were those conditions at the time of the original conveyance?
Reliance on aerial photography is a time honored procedure; but unfortunately only qualitative information is readily available. Techniques derived 100 years ago can enhance the data available through stereo modeling. Many of the commercial programs are beyond the financial reach of the average surveyor and the public domain programs (i.e. GRASS, et. al.) are time consuming to learn.
Deed calls that have never been surveyed, and many that have, call for "to the fence line", "to the centerline of the road", "to the creek" and "to the corner of Smith’s barn". Many of us ignore this distinction as superfluous. Not correct. The point called for may not presently exist. We must first extinguish our resources before accepting the default. Examples of this need are redundant and I am sure you can devise your own if you are reading this. As this investigation proceeds, I will supply my own for sample problems.
Finally, source must be ascertained for stereo pairs. You may have your own and I can recommend others (later in the investigation). Also note my terminology will not be found in any textbook, because they are not consistent.
And one source I have been using is cartlab@bama.ua.edu . About 10,000ft but is a scan of the print. Available from 1955 to 2009. Most stereo pairs. About 30Mb each 9" contact print.
Also, http://www.usgs.gov/pubprod/aerial.html High altitude = 40,000 BUT includes camera data. Average file 1Gb.
I think if we combine all our resources we can identify many unknown storage locations that will benefit all.
2. Brief Theory, Standard Conditions and Chronology
As time has permitted, I have tried to develop my own system, albeit somewhat clumsy and hopefully you can benefit from my long and tedious study. The theory is divided into two distinct observations 1) internal conditions and 2) external conditions. The internal characteristics must be solved first so we will discuss these calculations first. Figure below shows the basic internal set of parameters. The aircraft is flying along the "Y" axis at some angle oriented from the global coordinate system. The lense center is termed the exposure station and the orthogonal distance from the lense center to the film is termed the focal length. For a vertical photograph scale is easily determined and for level terrain measurements can be made from the positive. However, very rarely is the photograph truly vertical and tilt, yaw and roll values of 1 to 3 degrees are not uncommon. To the layman, the photograph appears as a true orthographic projection of the earths surface.


Not so, Dr. Watson, it is a perspective projection and the rules of perspective geometry apply. The intent of this treatise can not be construed to fully explain the mathematics and principles required to determine the unknown parameters. The fundamentals will be presented, similar to a plain surveying course and reading materials for your own investigation.
An example aerial photograph, recently utilized for one of my projects, is shown as Figure "147 Cropped". This photo is one of a stereo pair dated 1964 in Cullman County at Berlin Crossroads on US 278.
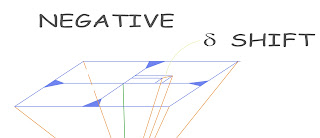
The middle fiducial mark is shown in the upper left corner and below a race track at the upper middle, no longer in place. Note that at the intersection of the county road south of US 278, the county road appears to have a curvature to the west. Actually the centerline is a straight line and a good example of relief displacement. The section line is shown immediately south of the #014043. The photo is oriented generally north. Thus the point here is relief displacement and its effect to our investigation(s). I have provided a figure which describes this parameter. This figure shows the delta change in the negative due to a vertical change in elevation. The negative position is in Region I, whereas the positive is Region III, trigonometrically. This is only one parameter that must be accounted for.
Remember, the discussion is presently directed for the internal characteristics of the individual photograph. The details shown are for level flight for convenience. We must make similar adjustments for non level flight, altitude and camera. The change in analysis of an individual photograph today is significantly different from those procedures I utilized as a young engineer and surveyor. Desktop computing has revolutionized data acquisition. The complex and expensive stereoplotter of yesterday is no longer necessary and this aspect encouraged the writer to pursue an economical means to utilize historical aerial photography. For a survey purposes, data acquisition is normally limited to one stereo model; whereas, photogrammetrists deal with entire counties and entail thousands of models.
Nearly ten years ago, pursuant to environmental investigations, I discovered the availability of various photography from the US government agencies and historical organizations, many dating to the 1950's. Often in my career I have wished to be able to ascertain the location of a specific topographic detail pertinent to the deed furnished. Thus I began a ten year quest that consisted of available textbooks, CEU courses and languages i.e., Visual Basic, C++ and FORTRAN compilers. Further any public domain software that would assist my limited knowledge with the matrix manipulations and least squares estimations were ferreted out.

3. Church’s Method and the Collinearity Equations
By chance I found Dr. Church’s "ELEMENTS OF PHOTOGRAMMETRY", 1948 Enhanced Edition, through one of AMAZON.com’s affiliates. Dr. Church and Dr. Quinn state in the preface "This book has been prepared to serve as a textbook for an introductory course in elementary photogrammetry. This edition presents the history and background of photogrammetry together with the basic principles and fundamental applications now possible in this most fascinating field". They further state on page 57 "A very important feature of this problem, however, is that it provides a means of measuring parallaxes without a stereoscope, linear measurements with an engineers scale being sufficient for finding the line of flight....This makes possible all of the photogrammetric operations...without the use of any equipment other than the photographs themselves and an ordinary engineer’s scale". Dr Church provided his expertise to the WW II war effort and afterwards at Syracuse University and The ASPRS for many years.
A straight line is a straight line. From Wolf, Elementary Photogrammetry , Second Edition, pg 245:
Space resection by collinearity involves formulating the so-called collinearity equations for a number of control points whose X, Y, and Z ground coordinates are known and whose images appear in the tilted photo. The equations are then solved for the six unknown elements of exterior orientation which appear in them. The collinearity equations express the condition that for any given photograph the exposure station, any object point and its corresponding image all lie on a straight line.
The solution can be a single ray oriented whereas you minimize the residuals for a single line to a control point. Otherwise you can minimize the entire system of lines involved utilizing all control points simultaneously. Believe me the statement "is readily programmed for solution" is an understatement. Maybe for them. Be advised, the mathematics is not for the faint of heart.








